Autonomous
Agile Rovers (A2R)
The goal of this project is to develop concepts and methodologies, and carry experimentation for a low cost agile rover to traverse distances of up to 20 miles over rough terrain autonomously with minimal or no human intervention. There are many applications for such a rover, such as scientific investigations (e,g. observation and sample collection), planetary explorations, and information gathering in hostile environments. Because of the low cost, a number of such rovers can be deployed to explore the environment in a collaborative manner and the loss a rover due to malfunction or accident would not pose a major problem in term of cost or disruption of the mission.
Koli is the first generation in the series of autonomous agile rovers (A2R) being developed at the Intelligent Machines and Robots Lab. It is a small rover (approximately the size of an average desk top printer). It is designed for autonomous traversals of 5 -7 miles. The figure below shows several phases of Koli's construction. Currently, all mechanical design and assembly of electronic components have been completed. Despite its small size, the challenges to overcome are similar to ones found in larger scale autonomous vehicles. Navigation is achieved through a combination of several sensing technologies and intelligent control systems for robust path following and collision avoidance.

Figure
1 .
Several phases of construction of Koli.
The figure below shows an overview of the sensor architecture implemented in Koli. It has two cameras, one CCD that is fixed pointing forward and another CMOS camera that is mounted on top of a pan and tilt actuator mechanism. Position acquisition is performed in two different ways. Absolute positioning is obtained through two GPS chips. Since speed is a fundamental factor in Koli, one of the GPS chips gets 4 position fixes per second. The other GPS chip is calibrated for very weak signals, which makes it possible to operate it in environments that are challenging to traditional GPS units such as under heavy foliage, short tunnels and canyons. When absolute positioning is not available, dead reckoning techniques are used to obtain relative positioning using a digital compass, wheel encoders and gyroscopes. The 3 gyroscopes will also serve for sensing pose and avoiding tipover. We also plan to implement an actuation mechanism for restoring the rover after a tipover.
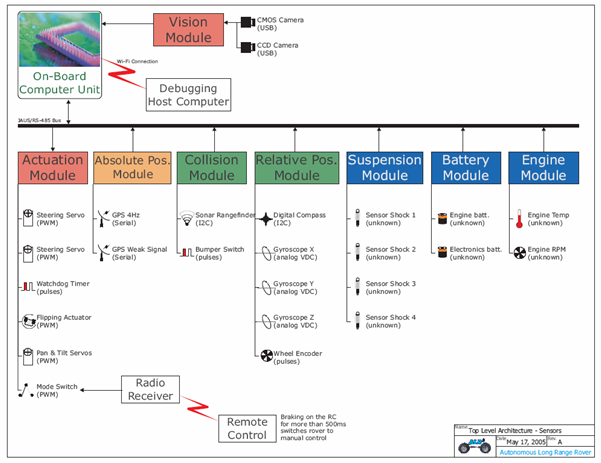
Sensor and actuators for Koli and Yaboo.
Collision avoidance behavior will be based on vision and a set of sonar sensors, also mounted on the pan and tilt platform. Koli has special front and rear bumpers designed to both reduce shock forces in case of inevitable impacts and collision detection through 6 switches installed within the bumpers.
The battery module and the engine module is responsible for collecting internal information. The CPU may decide to slow down or even halt if internal parts reach unsafe temperature or voltage levels. The suspension module in is formed by a set of activity sensors installed in each of the platform shock absorbers. These sensors give feedback on the type of terrain the rover is traveling. Over time using this feedback, Koli will be able to learn that certain terrain characteristics correspond to adverse conditions.
Yaboo, shown below, is a mid-size rover with a gasoline engine. It is being designed for about 20 miles of autonomous traversal. Yaboo's frame is an ATV which is being converted by replacing the steering column and accelerator for automatic actuation. Its instrumentation is similar to that of Koli.

|
