|
Autonomous Robotic Person Following
The goals of this project is to enable a robot follow a person in environments with various complexities. This research has many applications such as search and rescue operations and in warehouses, factory floors, hospitals and airports to mention just a few. The project has gone through a number of generations, each adding more capacities and features to the previous one. In this page two of these generations are described, i.e. person following with lighting variation and the latest generation which is person following in crowds.
Robotic Person Following with Significant Environment Lighting Variations
Vision based robotic person following in outdoor environments is a very challenging problem due to extreme variations in the lighting conditions and its effect of the color of persons outfit, as well as the effect of the reflected colored lights from buildings, trees, etc.


This project, sponsored by Center for Commercialization of advanced Technology and SPAWAR, uses a Segway platform (right figure above) to enable maneuvering in tight locations. The developed system addresses the difficulties mentioned above by controlling various camera and robot parameters. The research and development effort has resulted in a robotic system that is capable of following a person in several environments both indoors and outdoors. The robot has been equipped with an onboard computer, vision system and various other components. Novel algorithms and software have been developed as part of this project for various image processing and control functions. The video on top of the page demonstrates the capabilities of the system. Currently improvements are planned to make the system more robust and to cope with multi-colored person's outfit.

Third Generation
Overal System Architecture
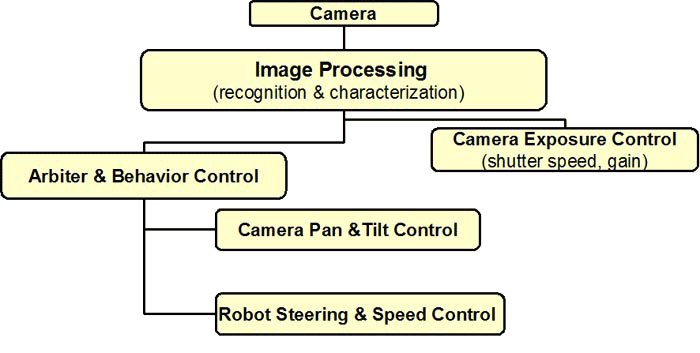
|
