Kinematics,
Path Following Control,
and Visualization of Mars Rovers
The goal of this NASA-sponsored project was to develop a kinematics model for Rocky type Mars rovers, a path following control and visualization of the rover traversing Mars type terrain.
Rocky 7 rover, shown in the figure below, has a complex mobility mechanism to enable it climb over rocks. This high mobility, however, makes the kinematic modeling of the rover and its interaction with the terrain a challenging task. We have developed a comprehensive kinematics model. Three types of kinematics, namely navigation, actuation and slip kinematics were derived. The slip kinematics is of particular interest since detection of rolling, side and turn slips provide information for proper actuation and control to reduce undesirable motions such as sliding, sliding and fishtailing. The actuation kinematics determines the commands to wheels and steering motors to achieve desired body motion.
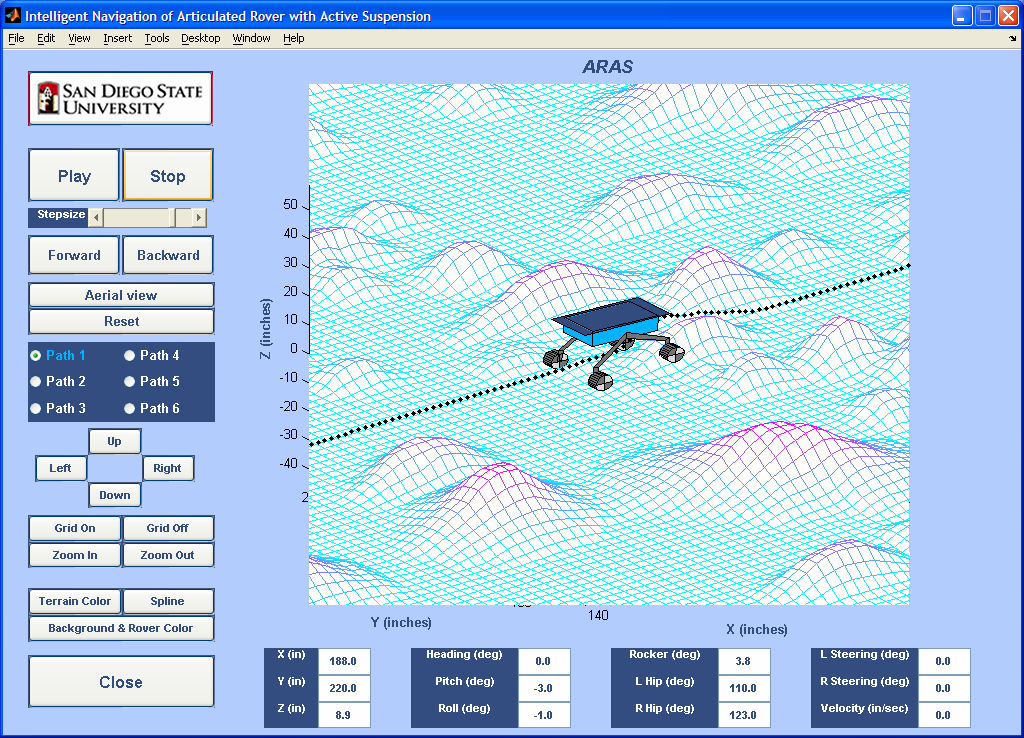
Simulation
and Visualization
A simulation package consisting of rover kinematics, path
following controller and rover contact kinematics was developed
in the Matlab/Simulink environment. The
graphics show the animation of the rover when following a
path over a rugged terrain.
 
A method has been developed for path following which consists of taking a set of way points specified by a path planner, and determining the desired rover heading and velocity in order to follow the path closely. Both classical controllers and fuzzy logic controller have been used for this task, and simulation studies have been carried out.
A simulation and visualization package consisting of rover kinematics, path following controller and rover contact kinematics was developed in the Matlab/Simulink environment. The graphics show the animation of the rover when following a path over a rugged terrain. Snapshot of the visualization is shown below.
|
