Path
Planning of Rovers Using
Fuzzy Logic and Genetic Algorithms
This project
is supported by NASA. The goal of the project is to develop
a path planner by taking into account terrain roughness, rover
mobility characteristics and path feasibility.
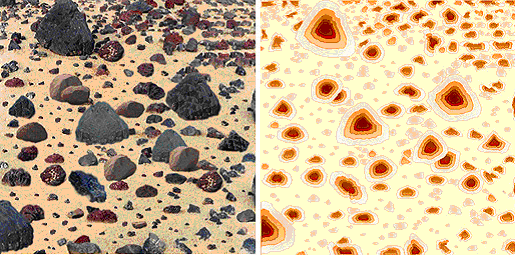
Images of the terrain are used to build a 3-D map of the environment.
However, due to the ambiguity an misinterpretation involved
in extracting information from images, the problem is set
and solved in a fuzzy and approximate reasoning framework.
A set of fuzzy rules relate the rock heights and sizes to
a terrain roughness array.
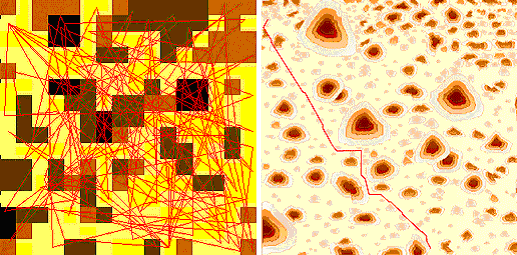
The path planner takes the terrain roughness, and uses a genetic algorithm to path the path. Several genetic operators have been designed for this purpose. A suitable fitness function that combines terrain roughness, path curvature and length is formulated to obtain the best path. The left figure below shows the terrain divided into cells with darker colors representing the cell roughness and redlines indicating paths generated during the evolution of the genetic path planner. The right figure shows the final path found by the planner.
|
